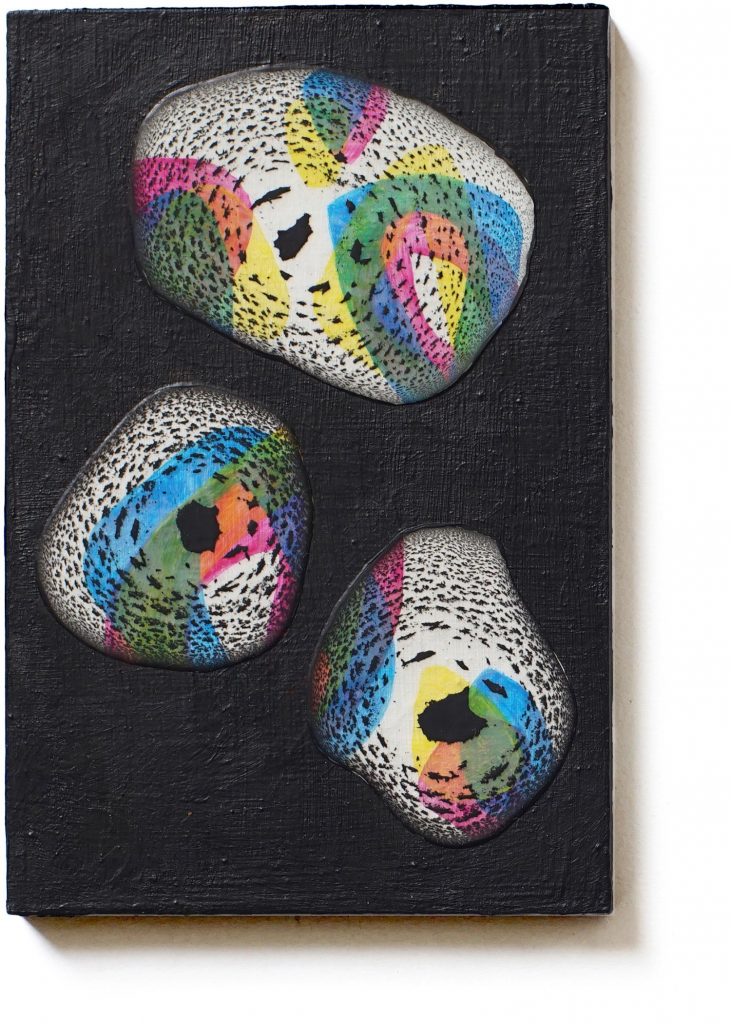
Pigments and synthetic binder on wood, 15 x 10 cm
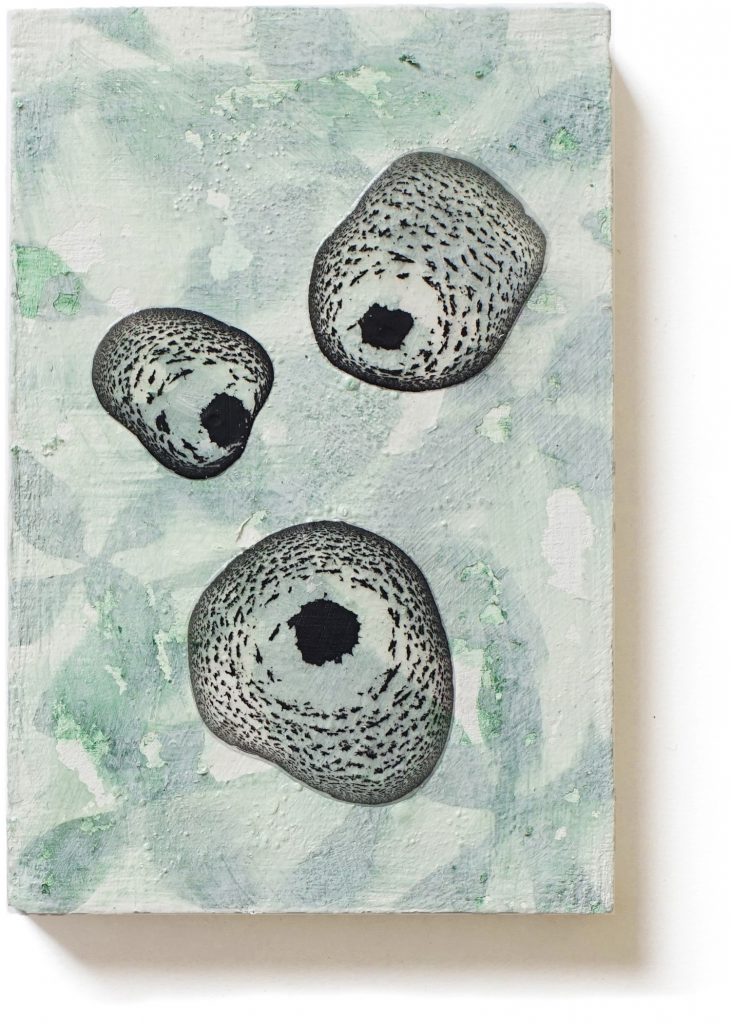
Pigments and synthetic binder on wood, 15 x 10 cm

Acrylic and avocado leaf between acrylic glass, 20 x 20 cm
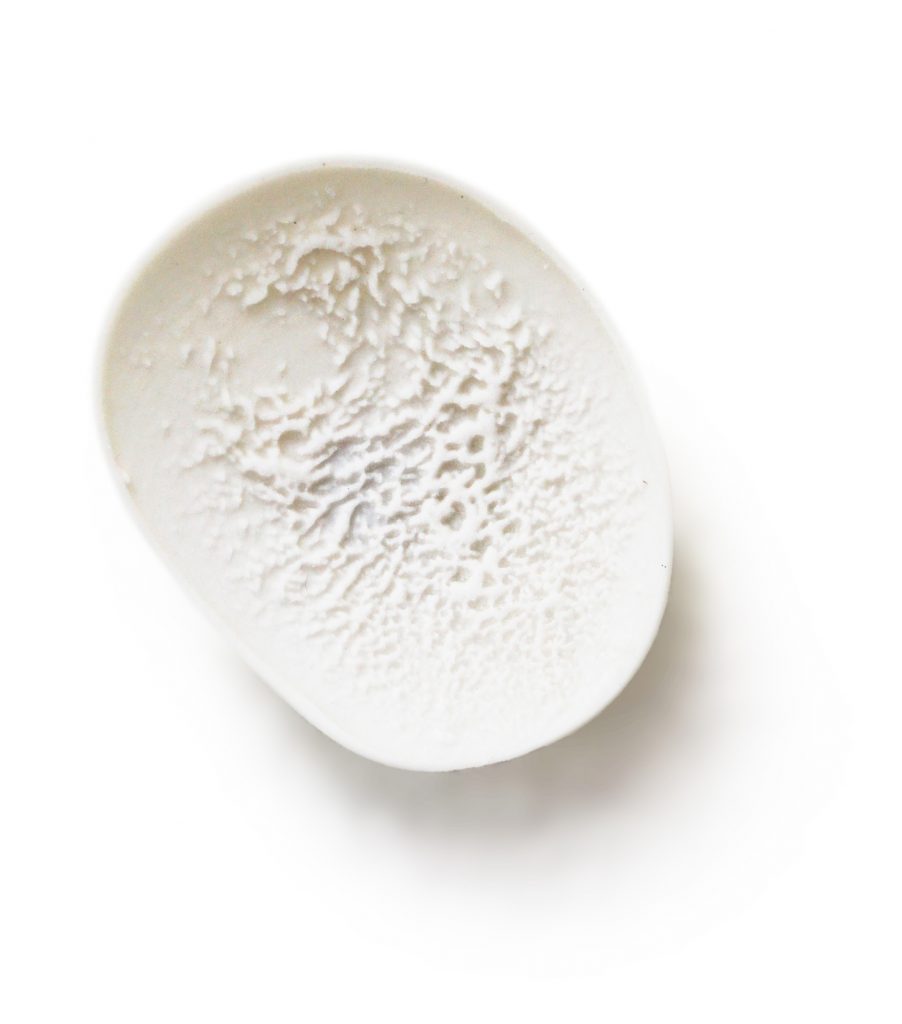
3D print made of gypsum, about 10cm in diameter

video still, 1920px x 1080px
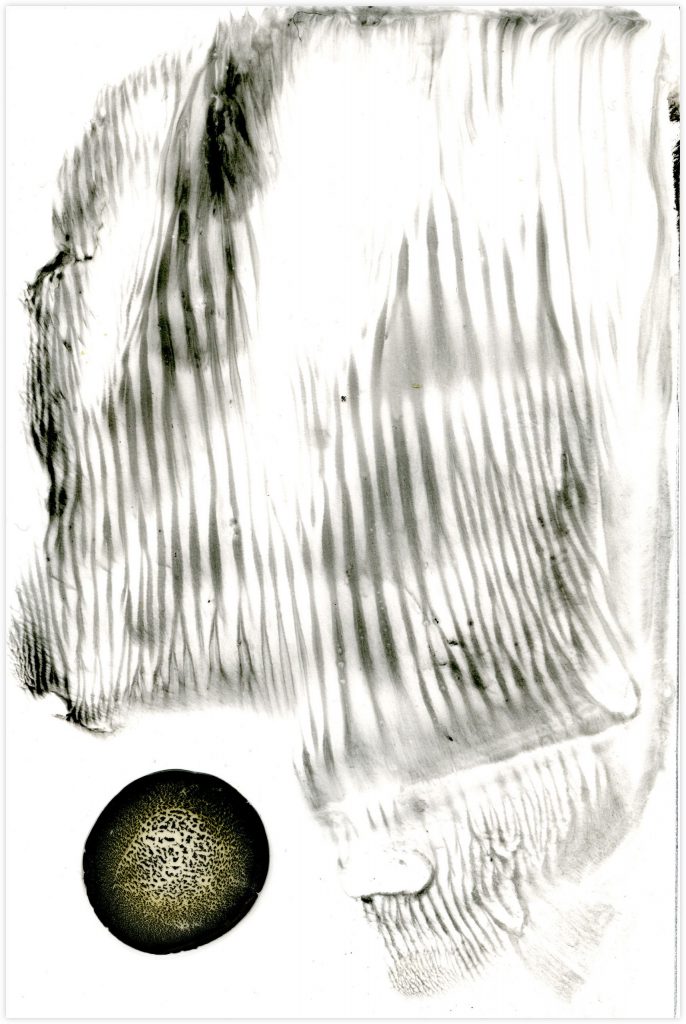
Pigments and synthetic binder on paper, 30cm x 20cm
Pigments and synthetic binder on paper, 30cm x 20cm
Pigments and synthetic binder on paper, 30cm x 20cm
Pigment and synthetic binder on wood, 130 cm x 100 cm

Pigment and synthetic binder on stone paper, 21 cm x 30 cm
Pigment and synthetic binder on stone paper, 21 cm x 30 cm
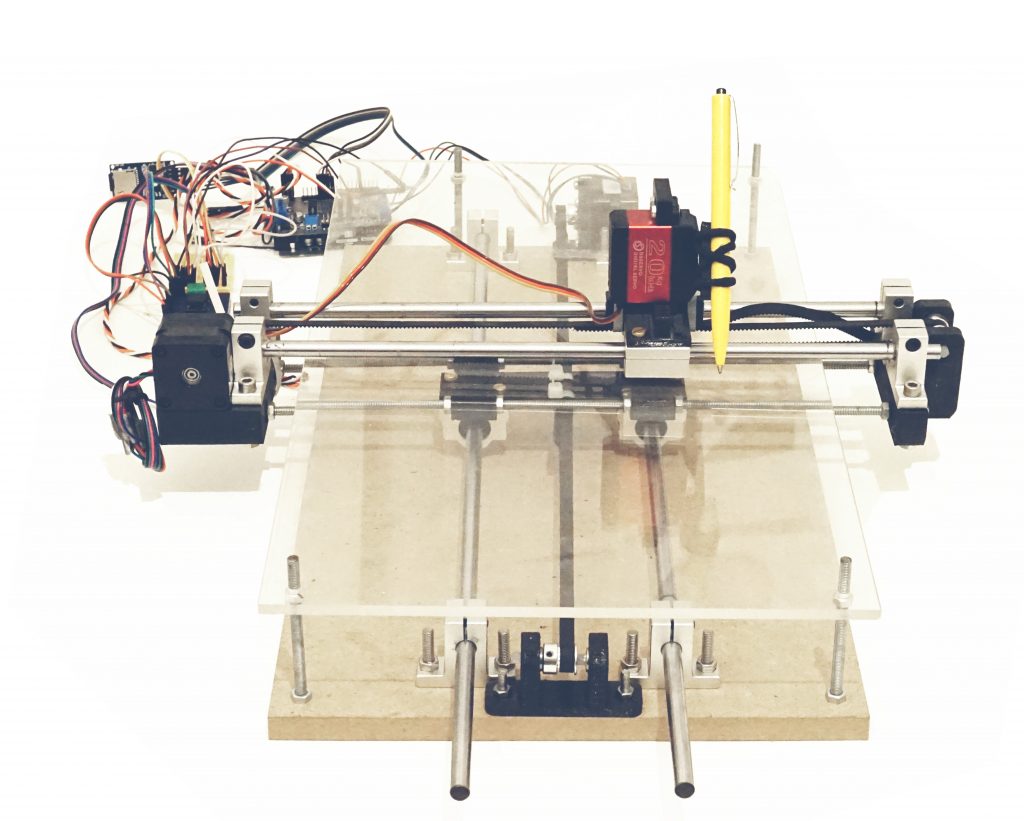
the first prototype draws single pieces up to A4 size. Fed with my generative adversarial neural network emergent autonomy results. (artificial intelligence)
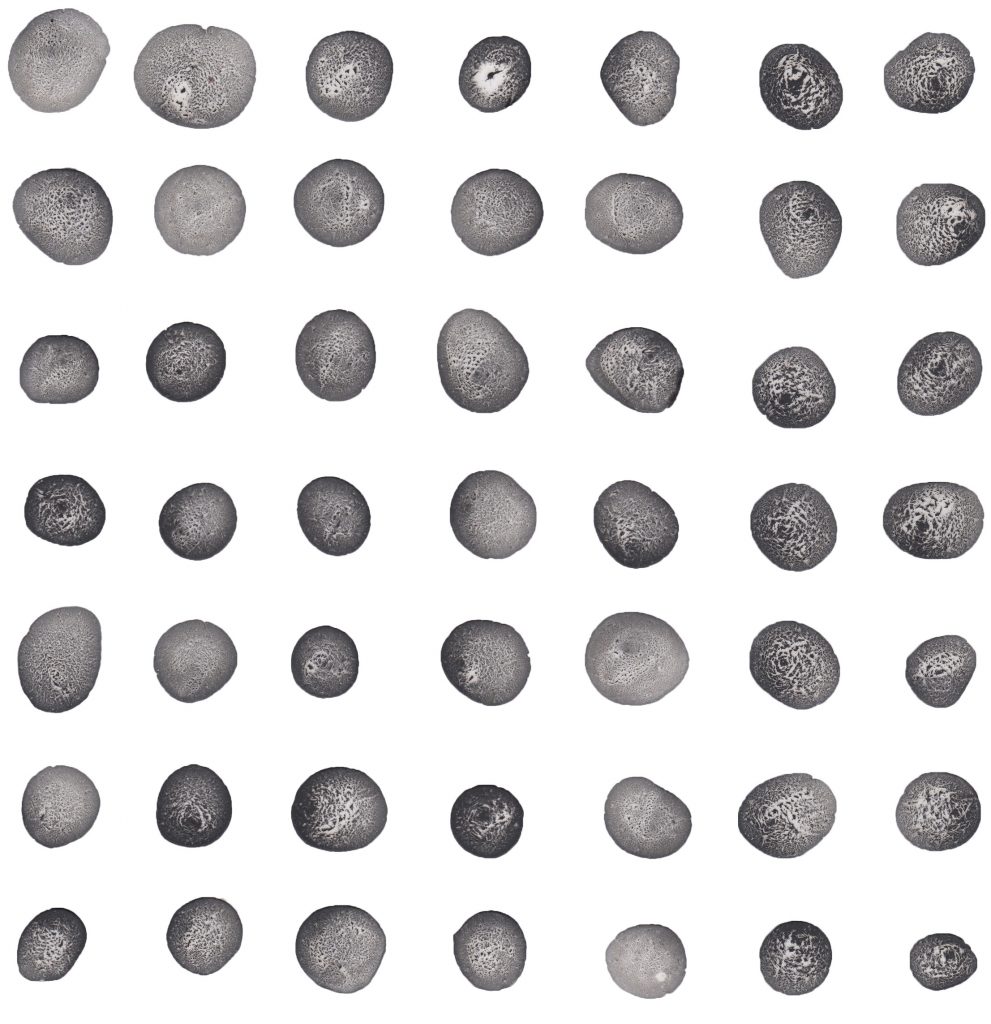
49 examples (of ~ 9000) hand made pignent cells from my dataset.
With this (entire) dataset I trained my first neural network for the robot.
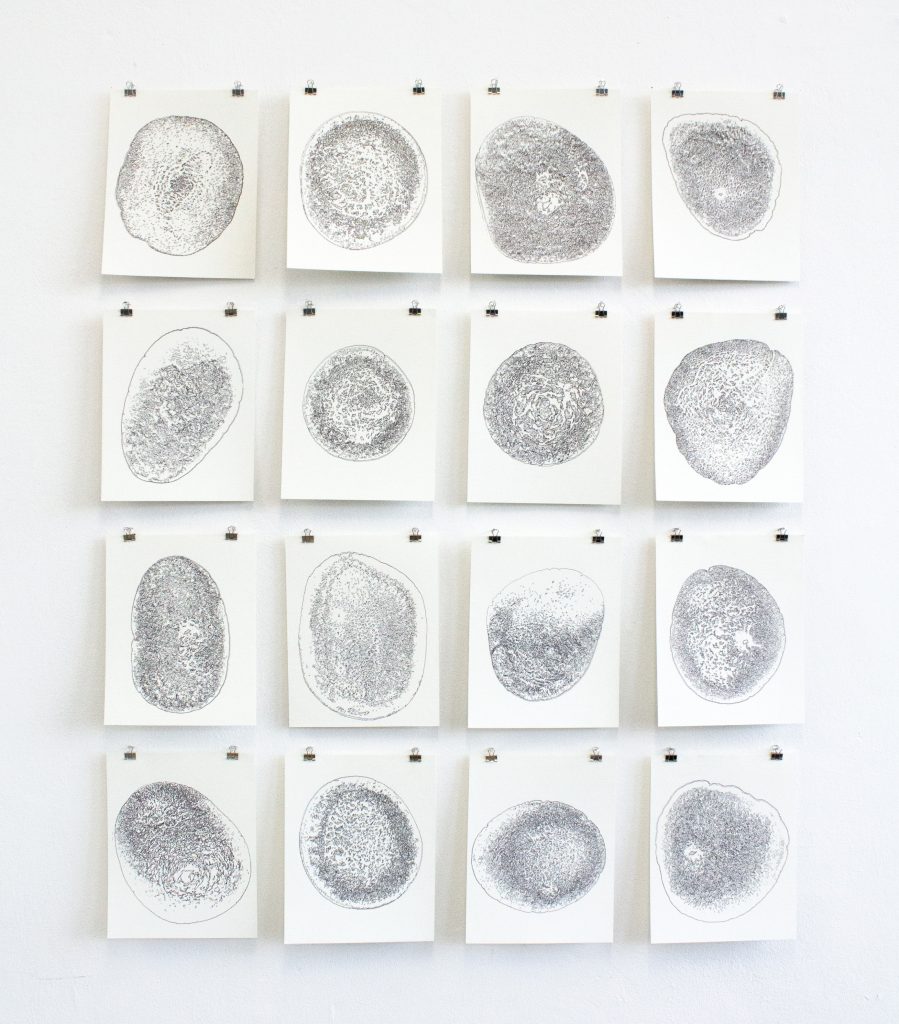
16 sketches, autonomously designed and drawn on paper by my artificial intelligence machine (Robot Version I), each 25 cm x 20 cm
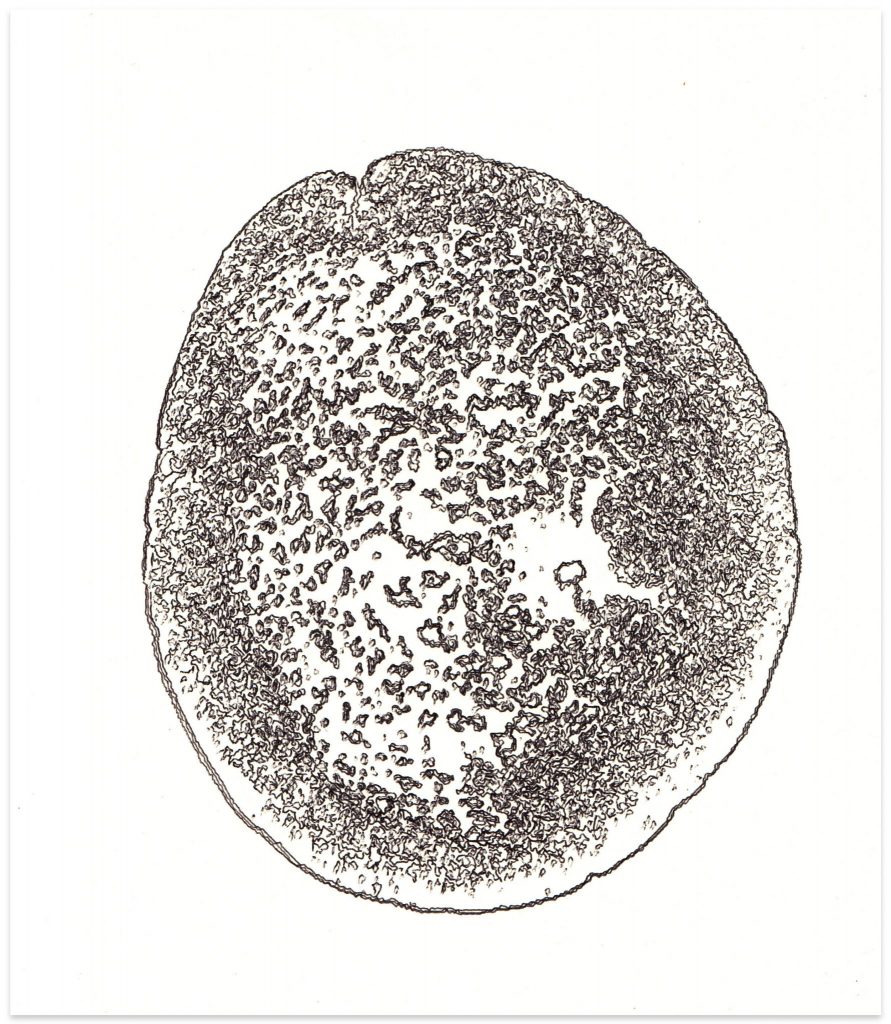
Example sketche, autonomously designed and drawn on paper by my artificial intelligence machine (Robot Version I), 25 cm x 20 cm
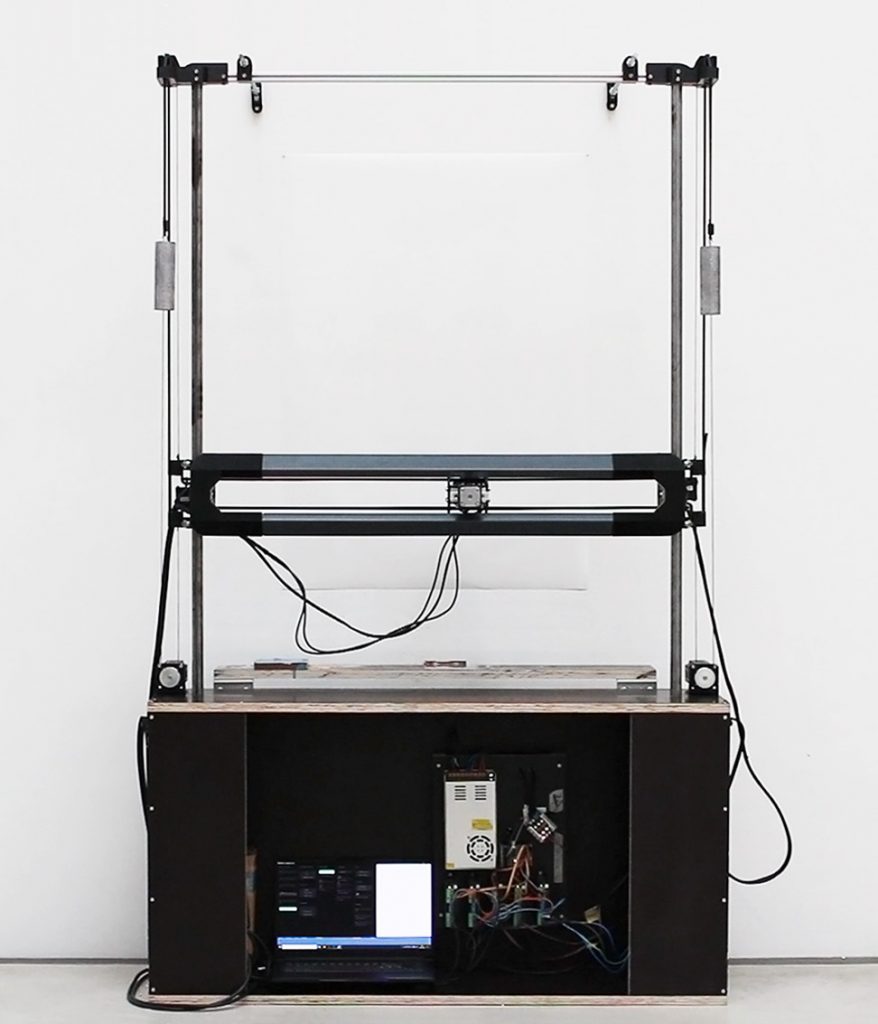
the second prototype paints artworks up to a size of 110 cm x 90 cm
using artificial intelligence.

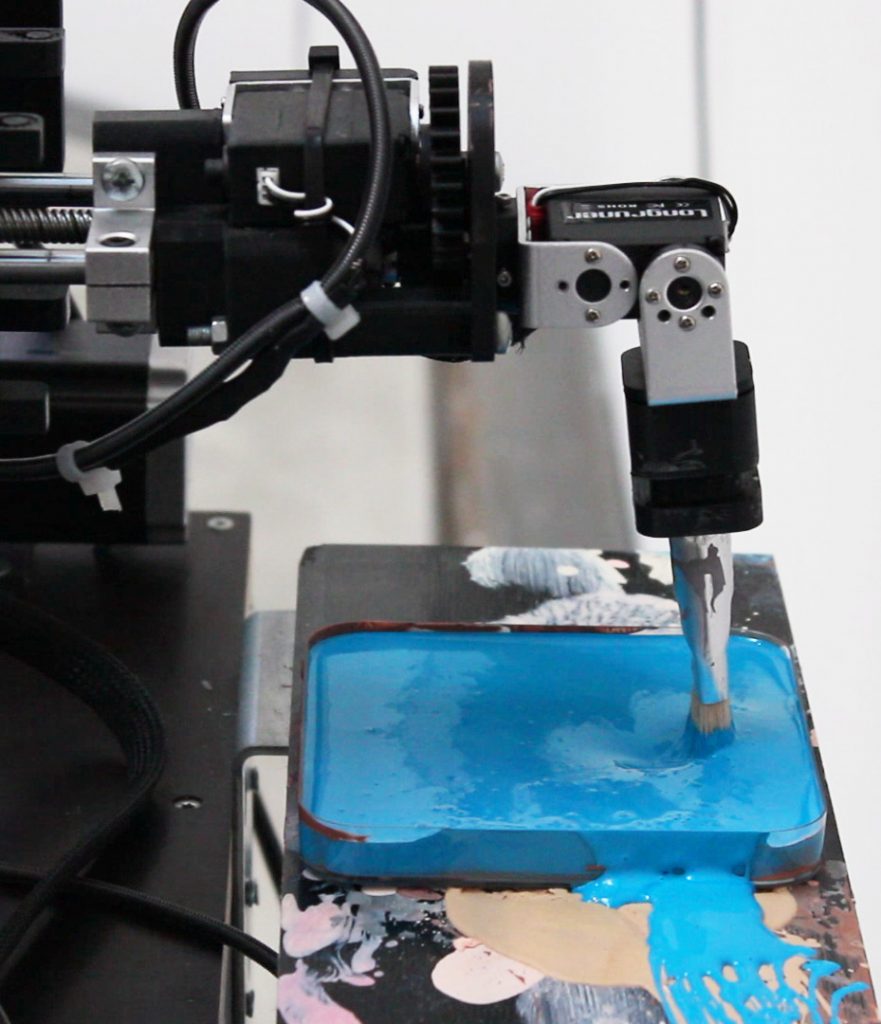
The machine learning algorithm decides autonomously on coloring, composition and realization. It is fixed to the wall and can paint both on canvas and on paper.

By using a magnetic connection, it can choose between three different brushes.
The self-constructed machine consists mainly of a steel tubes,
T-profiles, multiplex, 3D printed PLA parts, a Teensy microcontroller,
a computer, as well as stepper and servo motors. The project is
written in the programming languages C and python.

tools carved out of flint stones from the Baltic Sea

Object with real-time simulation of artificial microbes, 110 cm x 35 cm x 30 cm